 Photo by rawpixel on Unsplash
Photo by rawpixel on Unsplash
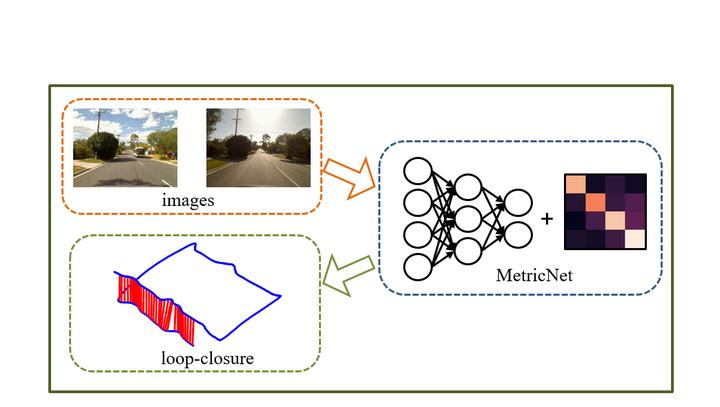
Loop Closure Detection (LCD), considered a key optimization part in the visual SLAM system, aims to recognize the places where a mobile robot previously visited. Correct loop closure detection benefits visual SLAM systems a lot because it can significantly reduce the position errors that accumulate over time. It enables the system to build a consistent map of the environment. We introduce the adaptive weighted similarity matrix by combining the feature extraction module and similarity measurement module to focus on changing appearance over time. Experiments on three typical open datasets are conducted to verify the feasibility of the proposed model.
Ran Zhu (朱然)
PhD candidate
My research interests include Visible Light Communication and Sensing, and Embedded AI for IoT.